介绍
pcl.js 是在浏览器中运行的 Point Cloud Library (PCL),由 Emscripten 和 WebAssembly 提供支持。
PCL(Point Cloud Library) 是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源 C++ 编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。支持多种操作系统平台,可在Windows、Linux、Android、Mac OS X、部分嵌入式实时系统上运行。如果说 OpenCV 是 2D 信息获取与处理的结晶,那么 PCL 就在 3D 信息获取与处理上具有同等地位,PCL 是 BSD 授权方式,可以免费进行商业和学术应用。
简单示例
TypeScript
import * as PCL from 'pcl.js';async function main() { await PCL.init({ url: 'https://cdn.jsdelivr.net/npm/pcl.js/dist/pcl-core.wasm', }); // 获取 PCD 文件 const data = await fetch('https://cdn.jsdelivr.net/gh/luoxuhai/pcl.js@master/data/rops_tutorial/points.pcd').then(res => res.arrayBuffer()); // 加载PCD文件数据,返回点云对象 const cloud = PCL.loadPCDData<PCL.PointXYZ>(data, PCL.PointXYZ); // 使用 StatisticalOutlierRemoval 过滤器去除异常值 // 参考: https://pcl.readthedocs.io/projects/tutorials/en/master/statistical_outlier.html#statistical-outlier-removal const sor = new PCL.StatisticalOutlierRemoval<PCL.PointXYZ>(PCL.PointXYZ); sor.setInputCloud(cloud); sor.setMeanK(40); sor.setStddevMulThresh(1.0); const cloudFiltered = sor.filter(); // 将过滤后的点云对象保存为PCD文件,内容为ArrayBuffer const cloudFilteredData = PCL.savePCDDataASCII(cloudFiltered);}main();| 过滤前 | 过滤后 |
|---|---|
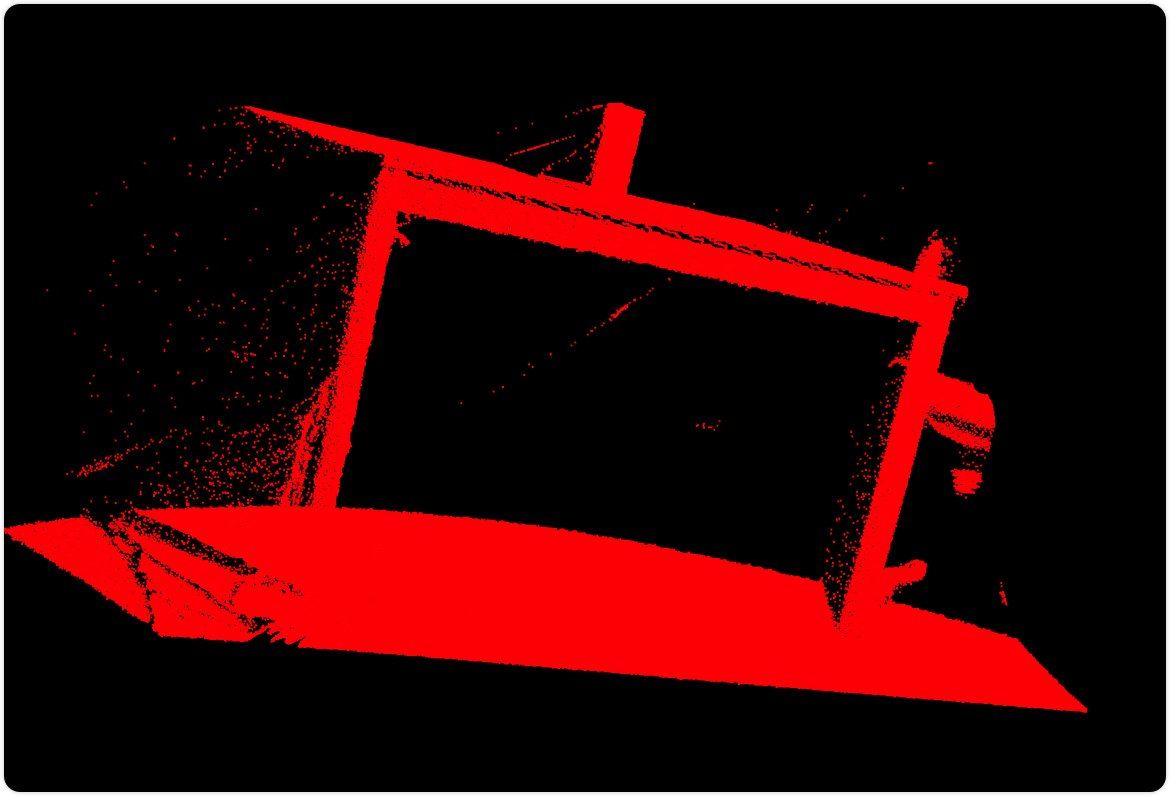 | 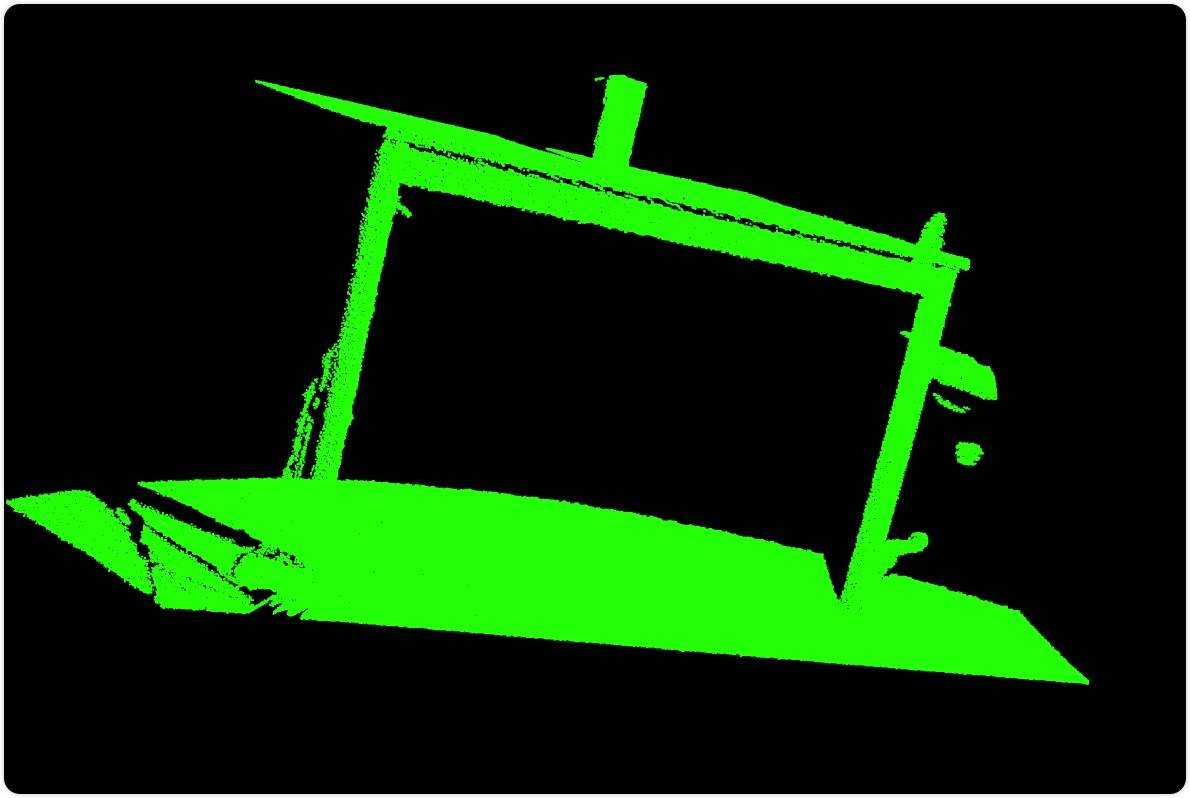 |
