Introduction
pcl.js is a Point Cloud Library (PCL) that runs in the browser, powered by Emscripten and WebAssembly.
The Point Cloud Library (or PCL) is a large scale, open project for 2D/3D image and point cloud processing. The PCL framework contains numerous state-of-the art algorithms including filtering, feature estimation, surface reconstruction, registration, model fitting and segmentation. These algorithms can be used, for example, to filter outliers from noisy data, stitch 3D point clouds together, segment relevant parts of a scene, extract keypoints and compute descriptors to recognize objects in the world based on their geometric appearance, and create surfaces from point clouds and visualize them – to name a few.
Basic Usage Example
TypeScript
import * as PCL from 'pcl.js';async function main() { // Initialization await PCL.init({ url: 'https://cdn.jsdelivr.net/npm/pcl.js/dist/pcl-core.wasm', }); // Get PCD file const data = await fetch('https://cdn.jsdelivr.net/gh/luoxuhai/pcl.js@master/data/table_scene_lms400.pcd').then(res => res.arrayBuffer()); // Load PCD file data, return point cloud object const cloud = PCL.loadPCDData<PCL.PointXYZ>(data, PCL.PointXYZ); // Removing outliers using a StatisticalOutlierRemoval filter // See: https://pcl.readthedocs.io/projects/tutorials/en/master/statistical_outlier.html#statistical-outlier-removal const sor = new PCL.StatisticalOutlierRemoval<PCL.PointXYZ>(PCL.PointXYZ); sor.setInputCloud(cloud); sor.setMeanK(40); sor.setStddevMulThresh(1.0); const cloudFiltered = sor.filter(); // Save filtered point cloud objects as PCD files, the content is ArrayBuffer const cloudFilteredData = PCL.savePCDDataASCII(cloudFiltered);}main();| Original | Filtered |
|---|---|
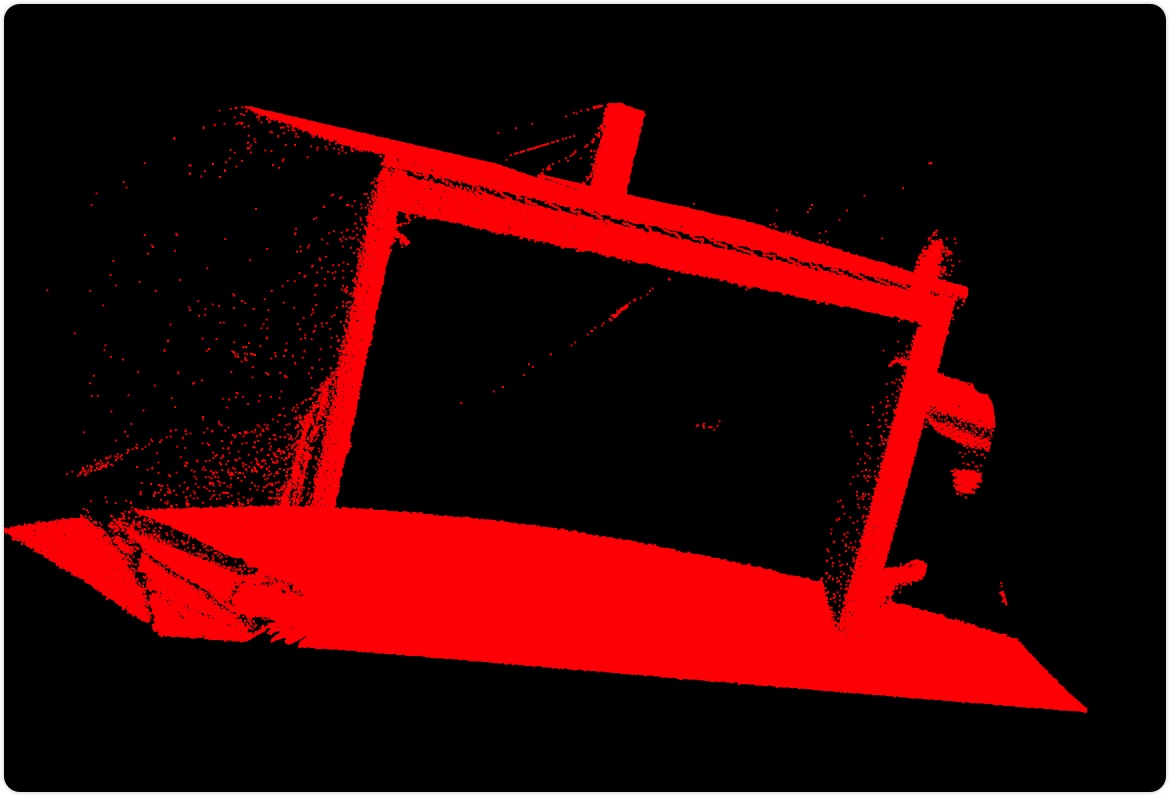 | 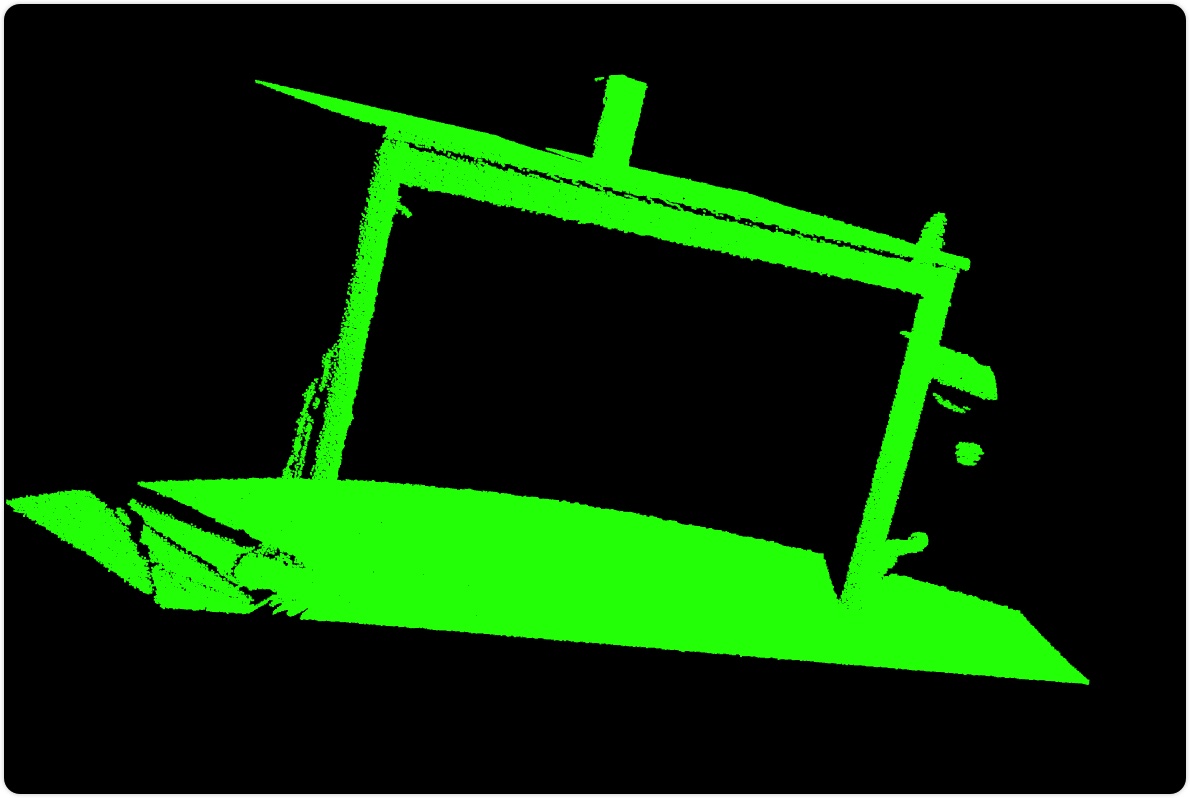 |
